Unu-veturada-du-paŝa motoro R60-D


Produkta Enkonduko
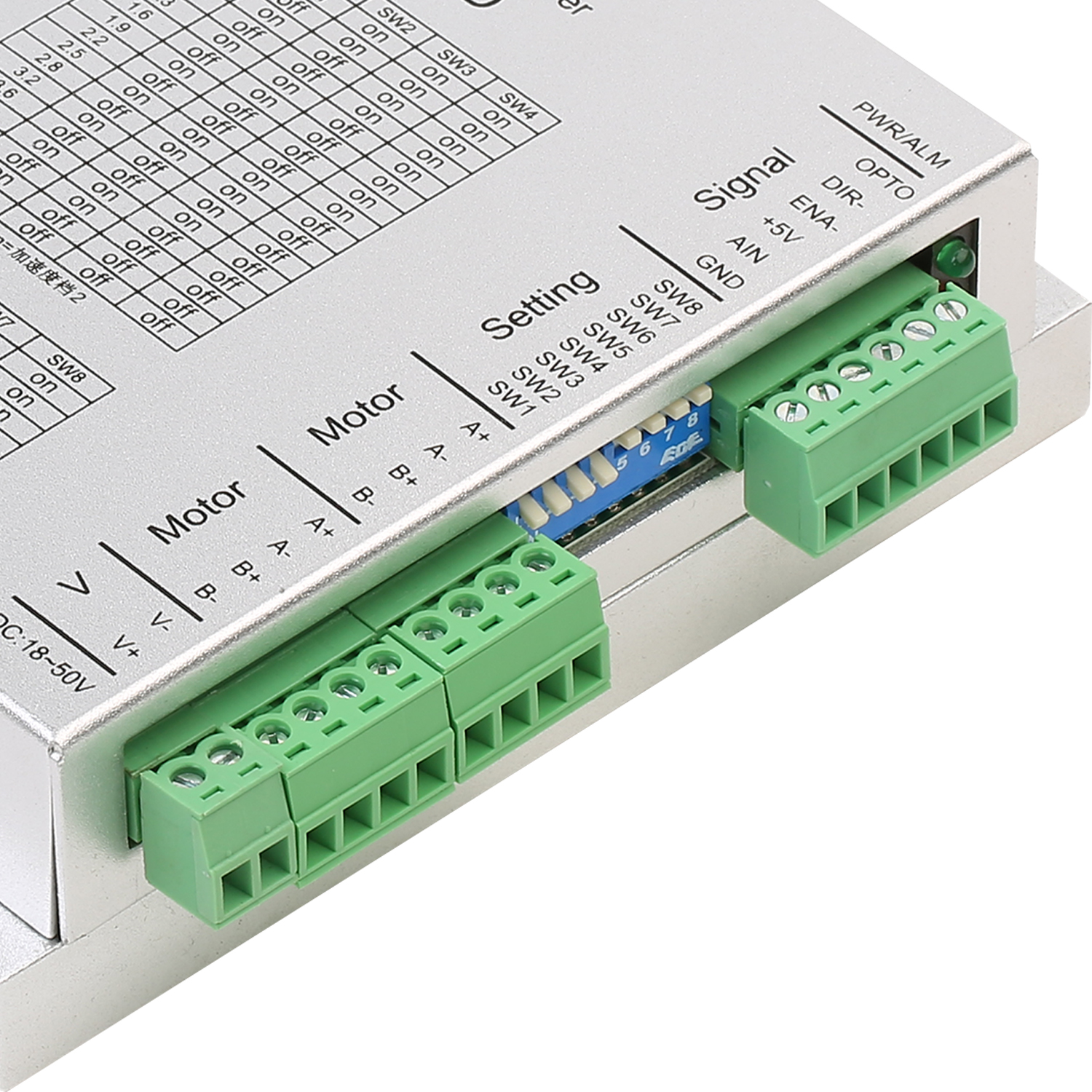


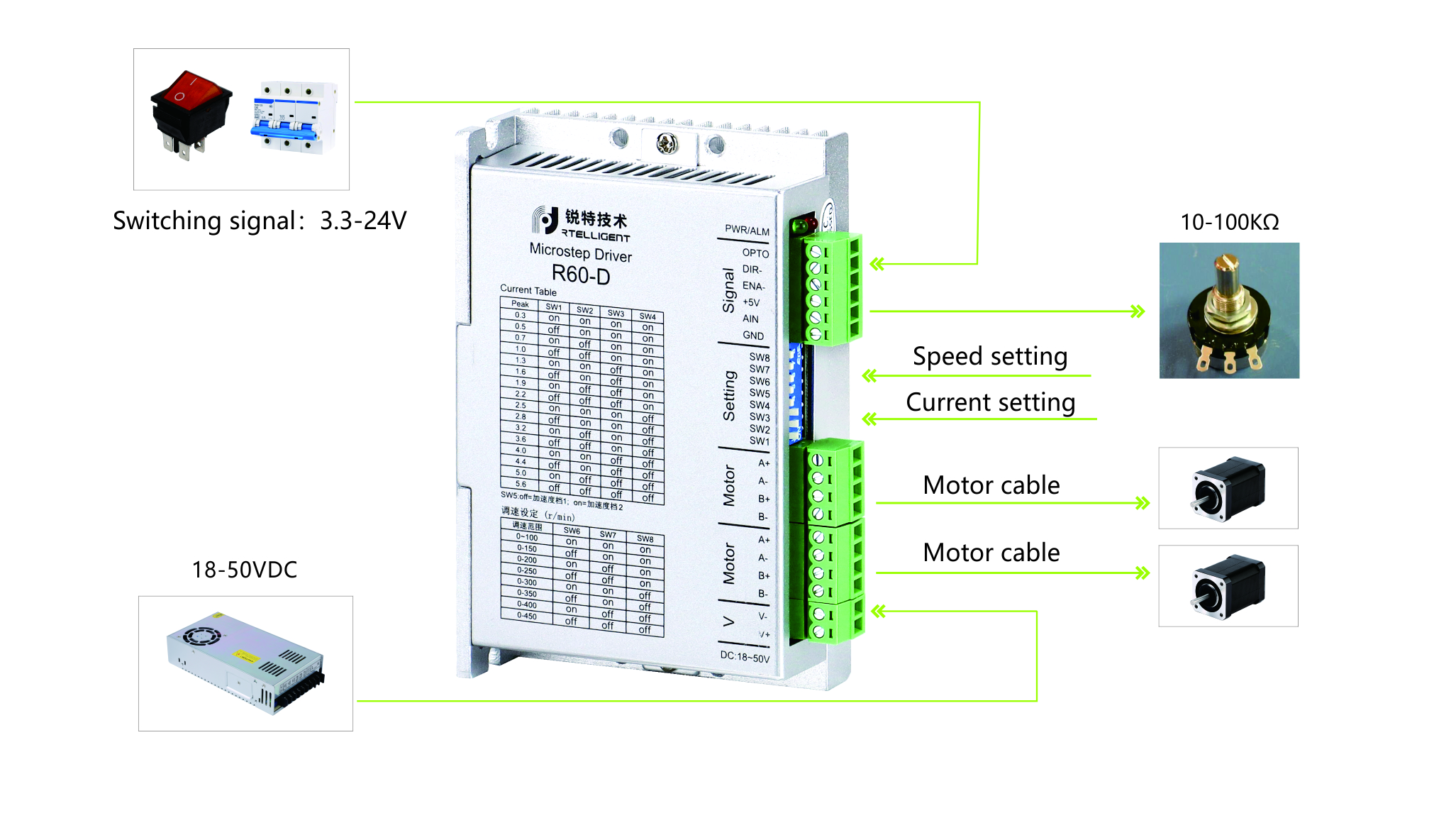
Konekto
Drataro de Kontrola Signalo
| Funkcio | Marko | Difino |
| Potenca eniga terminalo | V+ | Enigo pozitiva kontinua kurenta elektroprovizo |
| V- | Enigo de kontinua kurento (DC) negativa | |
| Motoro 1 Terminalo | A+ | Konekti motoron 1 A fazo volvaĵo finiĝas |
| A- | ||
| B+ | Konekti motoron 1 B-fazon al ambaŭ finoj | |
| B- | ||
| Motoro 2 Terminalo | A+ | Konekti motoron 2 A fazajn volvaĵfinojn |
| A- | ||
| B+ | Konekti la fazon B de la motoro 2 al ambaŭ finoj | |
| B- | ||
| Rapidregula haveno | +5V | Potenciometro maldekstra fino |
| AIN | Potenciometra alĝustiga terminalo | |
| GND | Potenciometro dekstra fino | |
| Komenco kaj inversigo (AIN kaj GND devas esti kurtcirkvitaj se ne konektitaj al potenciometro) | OPTO | 24V elektroprovizo pozitiva terminalo |
| DIR- | Inversiga terminalo | |
| ENA- | Komencu terminalon |
Aktuala Agordo
| Pinta kurento (A) | SW1 | SW2 | SW3 | SW4 | Rimarko |
| 0.3 | ON | ON | ON | ON | Aliaj nunaj valoroj povas esti adaptitaj |
| 0.5 | MALŜALTI | ON | ON | ON | |
| 0.7 | ON | MALŜALTI | ON | ON | |
| 1.0 | MALŜALTI | MALŜALTI | ON | ON | |
| 1.3 | ON | ON | MALŜALTI | ON | |
| 1.6 | MALŜALTI | ON | MALŜALTI | ON | |
| 1.9 | ON | MALŜALTI | MALŜALTI | ON | |
| 2.2 | MALŜALTI | MALŜALTI | MALŜALTI | ON | |
| 2.5 | ON | ON | ON | MALŜALTI | |
| 2.8 | MALŜALTI | ON | ON | MALŜALTI | |
| 3.2 | ON | MALŜALTI | ON | MALŜALTI | |
| 3.6 | MALŜALTI | MALŜALTI | ON | MALŜALTI | |
| 4.0 | ON | ON | MALŜALTI | MALŜALTI | |
| 4.4 | MALŜALTI | ON | MALŜALTI | MALŜALTI | |
| 5.0 | ON | MALŜALTI | MALŜALTI | MALŜALTI | |
| 5.6 | MALŜALTI | MALŜALTI | MALŜALTI | MALŜALTI |
Mikro-paŝa Agordo
| Rapideca gamo | SW4 | SW5 | SW6 | Rimarko |
| 0~100 | ON | ON | ON | Aliaj rapidintervaloj povas esti agorditaj |
| 0~150 | MALŜALTI | ON | ON | |
| 0~200 | ON | MALŜALTI | ON | |
| 0~250 | MALŜALTI | MALŜALTI | ON | |
| 0~300 | ON | ON | MALŜALTI | |
| 0~350 | MALŜALTI | ON | MALŜALTI | |
| 0~400 | ON | MALŜALTI | MALŜALTI | |
| 0~450 | MALŜALTI | MALŜALTI | MALŜALTI |
Produktaj Informoj
Jen la revolucia R60-D unu-motora duobla paŝomotoro, revolucia produkto kiu alportas altnivelan teknologion al la mondo de paŝomotoroj. Kun siaj esceptaj trajtoj kaj senkompara agado, la R60-D redifinos la manieron kiel vi spertas motorregadon.
La R60-D estas desegnita por aplikoj postulantaj precizan kaj efikan regadon de du paŝomotoroj. Ĉu temas pri roboto, CNC-maŝino aŭ aŭtomatiga sistemo, ĉi tiu pelilo promesas elstarajn rezultojn. Kun sia kompakta formo kaj simpla instalprocezo, integri la R60-D en vian ekzistantan sistemon estas tre facile.
Unu el la ĉefaj trajtoj de la R60-D estas la kapablo regi du paŝomotorojn sendepende. Ĉi tio ebligas samtempajn kaj sinkronigitajn movojn, tiel pliigante la precizecon kaj ĝustecon de viaj projektoj. La pelilo subtenas diversajn paŝorezoluciojn de plenaj paŝoj ĝis mikropaŝoj, donante al vi kompletan kontrolon super la movo de la motoro.
Alia rimarkinda trajto de la R60-D estas ĝia altnivela teknologio por kontroli la kurenton. La pelilo uzas kompleksajn algoritmojn por certigi optimuman distribuon de kurento al la paŝomotoroj, rezultante en tre glata kaj preciza movado. Ĉi tiu teknologio ne nur plibonigas la ĝeneralan rendimenton de la sistemo, sed ankaŭ plilongigas la vivon de la motoro reduktante varmogeneradon.
Krome, la R60-D havas fortikan protektan sistemon por protekti vian motoron kontraŭ eblaj damaĝoj. Ĝi integras protektajn mekanismojn kontraŭ troa kurento, troa tensio kaj trovarmiĝo por certigi, ke via motoro restas sekura sub severaj funkciaj kondiĉoj. La transmisio ankaŭ havas eliran signalon por eraroj, kiu povas esti konektita al ekstera alarmilo, provizante plian sekurecon.
La R60-D estas desegnita por facileco de uzo, kun klara LED-ekrano kaj intuiciaj kontrolbutonoj. Ĉi tio ebligas facilan agordon kaj monitoradon de diversaj parametroj kiel motora kurento, paŝorezolucio kaj akcelo/malakcelo-kurboj. Per fajnagordado de ĉi tiuj agordoj, vi povas optimumigi la rendimenton de la motoro por plenumi viajn specifajn bezonojn.
Resumante, la R60-D unu-motora duobla paŝomotoro estas pintnivela produkto, kiu kombinas altnivelan teknologion kun superaj funkcioj. Ĝia kapablo sendepende regi du paŝomotorojn, kunligita kun altnivela kurentkontrola teknologio kaj potencaj protektaj sistemoj, igas ĝin ideala por aplikoj, kiuj postulas precizan kaj efikan motorkontrolon. Kun la R60-D, vi povas levi viajn projektojn al novaj altoj kaj atingi elstarajn rezultojn.
-
 Uzanto-manlibro de Rtelligent R60-D
Uzanto-manlibro de Rtelligent R60-D